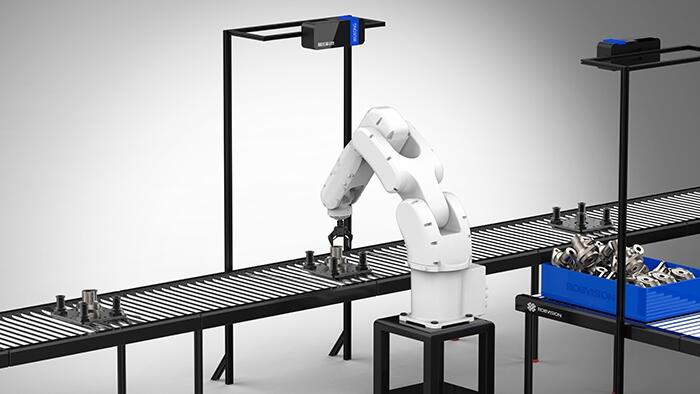
基于結構光測量技術和3D物體識別技術開發的機器人3D視覺引導系統,可對較大測量深度范圍內散亂堆放的零件進行全自由的定位和拾取。相比傳統的2D視覺定位方式只能對固定深度零件進行識別且只能獲取零件的部分自由度的位置信息,具有更高的應用柔性和更大的檢測范圍。可為機床上下料、零件分揀、碼垛堆疊等工業問題提供有效的自動化解決方案。
工業級
高清點云(1920×1200)、點云圖
同時輸出點云和RGB信息
GPU加速
高分辨率
1920*1200深度圖
&點云圖
超高精度
工業級標準
精度可高達+/-0.02mm
硬件加速
采用GPU加速,
同時輸出點云和RGB圖
高適應性
不受環境光和對比度影響,
更全面更廣泛的應用場景
3D視覺機械上下料——智能3D檢測定位算法
智能檢測 3D定位
wukong智能算法模塊
無需CAD文件,通過深度學習讓機器快速辨識物件
位置合適的3D抓取定位
時間合適的機械手路徑規劃
標準的TCP/IP通訊接口,輕松對接不同品牌機械手
3D視覺機械上下料技術參數:
|
|
WuKong-0230B
|
WuKong-0230C
|
WuKong-0300B
|
|
描述
|
為零件分揀設計,適用于各種金屬、黑色零件。
|
RGBD同時成像,大視野,適用于快遞、零食、藥品等商品分揀
|
可精確掃描,適用于掃描電子PCB板等小物體。
|
|
像素
|
2.3M
|
2.3M
|
3M
|
|
視野(mm)★
|
375*235~2000*1250
|
375*235~2000*1250
|
389*243*80
|
|
掃描時間(s)★
|
最快0.2
|
|
工作距離(s)★
|
0.45~2.4
|
0.45~2.4
|
0.7
|
|
Z軸精度★
|
0.4mm@1m
|
0.6mm@1m
|
0.1mm@0.7m
|
|
數據接口
|
RJ45以太網(Gige)
|
|
供電
|
DC12V 6A
|
|
體積
|
-
|
-
|
-
|
★號部分表示根據實際應用在此范圍內可定制;