|
產(chǎn)品名稱
|
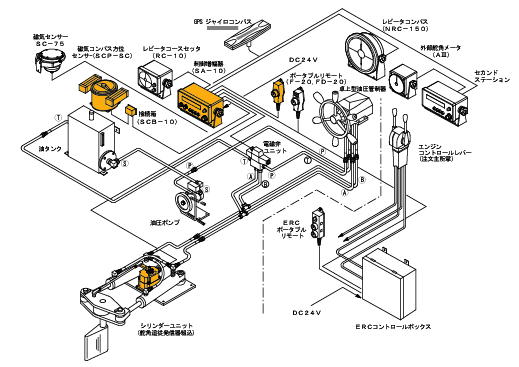
全向計算機自動轉(zhuǎn)向裝置
|
|
|
SA-10α(alpha)
|
|
電源電壓
|
DC13.8V-30V
|
|
當(dāng)工作電流處于待機狀態(tài)時
|
0.3A
|
|
驅(qū)動電磁閥時
|
1.4A
|
|
方向表精度
|
XY型全向傳感器輸入:相對于傳感器輸出±1°
|
|
|
輸入NMEA時:±0°但是,小數(shù)點后的數(shù)字將被截斷。
|
|
舵角指示器
|
背光LCD右側(cè)的條形圖顯示LCD LCD顯示屏
|
|
|
LCD LCD顯示屏還顯示轉(zhuǎn)向模式,遠(yuǎn)程號碼和錯誤。
|
|
方向傳感器輸入
|
XY型全向傳感器1系統(tǒng)
|
|
|
在2.5V的參考電壓和地磁0°至359°的情況下為±2V(XY)
|
|
陀螺方向輸入
|
NMEA-HDT,HDM電流方向(NMEA0183V2.0或更高版本)1個系統(tǒng)
|
|
|
主要是GPS指南針和陀螺儀。通過鍵盤在方向傳感器和陀螺儀方向輸入之間切換
|
|
GPS導(dǎo)航輸入
|
NMEA183-APB目標(biāo)本地位置(NMEA0183V2.0或更高版本)1個系統(tǒng)
|
|
|
BOD + XTE可選
|
|
方向輸出
|
HDMI183-HCHDT,HDM 1系統(tǒng)
|
|
|
Saura SA-10格式同時輸出(輸出周期:約0.3秒)
|
|
外部電源輸出
|
500mA
|
|
便攜式遙控器
|
2KΩ電位計2個系統(tǒng)
|
|
舵角跟蹤發(fā)射機真實角度
|
2KΩ或2.5KΩ電位計1個系統(tǒng)
|


品")

網(wǎng)站")