- 產品
- 供應
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
6SL3210-5FB10-1UA2西門子V90 0.1KW 200V驅動器

|
SINAMICS V90, 輸入電壓: 200-240 V 1 相/三相交流 - 15 %/+ 10 % 2.5 A/1.5 A 45-66 輸出電壓:0 – 輸出 1.2 A 0-330 Hz 電機:0.1 kW 防護方式:IP20 尺寸 A, 45x170x170(寬x高x深)
|
SIEMENS西門子
上海麗丞工業自動化設備有限公司
全新原裝,質量保證,保修一年
銷售及維修西門子各類工控自動化配件;
:S7-200CN、S7-200SMART、S7-300、S7-400、 S7-1200、S7-1500、ET200、LOGO邏輯控制模塊 、西門子可編程控制器
西門子樓宇自控
西門子HMI人機界面:觸摸屏
西門子變頻器:MM420、MM430、MM440、G110、G120、6SE70
西門子工業以太網:通訊網卡、通訊電纜、通訊接頭、總線連接器 工控機、交換機、自動化軟件等系型號齊全,快速報價,買我們的產品無憂所值,我們的產品都承諾質保一年,讓您買的省心舒心,用的放心!
SINAMICS V90是西門子推出的一款小型、高效便捷的伺服系統。它作為 SINAMICS 驅動系列家族的新成員,與SIMOTICS S-1FL6 伺服電機完美結合,組成最佳的伺服驅動系統,實現位置控制、速度控制和扭矩控制。目前1FL6電機有兩種編碼器類型,即增量編碼器類型及絕對值編碼器類型。
西門子的小型自動化S7-200 SMART PLC可以控制V90驅動器,本文介紹如何實現SMART PLC讀取1FL6伺服電機的絕對值編碼器數值。
關于如何實現SMART PLC控制V90實現定位控制請參見《SIMATIC S7-200 SMART 系統手冊》及《S7-200 SMART連接SINAMICS V90 實現位置控制》。
|
序號 |
設備名稱 |
訂貨號 |
|
1 |
PS207電源 24 V DC/2.5 A |
6EP1 332-1LA00 |
|
2 |
SIMATIC S7-200 SMART CPU ST60 |
6ES7288-1ST60-0AA0 |
|
3 |
V90驅動器 |
6SL3210-5FE10-4UA0 |
|
4 |
伺服電機 |
1FL6042-1AF61-0LG1 |
|
5 |
V90 動力電纜 (含接頭) |
6FX3002-5CL01-1AD0 |
|
6 |
伺服電機編碼器電纜 |
6FX3002-2DB10-1AD0 |
|
7 |
V90 控制信號電纜(含 50 針接頭及 1m 電纜線) |
6SL3260-4NA00-1VB0 |
|
8 |
SIMATIC Field PG M3 |
6ES7715-1BB23-0AA1 |
|
9 |
Mini USB電纜 |
|
|
序號 |
說 明 |
|
1 |
Window 7 旗艦版 32位 |
|
2 |
STEP 7-Micro/WIN SMART 編程軟件 |
|
3 |
SINAMICS_V-ASSISTANT |
如圖1,使用PG通過標準mini USB電纜與V90連接,打開SINAMICS V—ASSITANT軟件設置驅動器的參數。

圖1 PG與V90連接
如圖2所示,PLC通過V90上的RS485通訊讀取編碼器調整狀態并且通過V90的數字量輸出檢查V90的驅動器狀態,判斷絕對位置是否有效。如果V90的DO1=1,DO2=0和DO3=1且r2507=3,這意味著PLC可以有效地讀取編碼器的絕對位置,此時可以通過RS485 USS通訊讀取絕對位置(r2521[0]),否則r2521是無效的。PLC可以通過數字量輸出報警或面板來提示用戶當前r2521無效。讀取r2521值后,PLC可以通過PTI方式輸出脈沖給驅動器執行相應的運動控制。
圖2 PLC與V90系統連接圖
根據SIMATIC S7-200 SMART CPU ST60的運動控制功能信號分配和V90端子定義進行接線(詳見《SINAMICS V90 OPI操作手冊》);使用SINAMICS_V-ASSISTANT對SINAMICS V90進行參數設置以及對電機的絕對值編碼器進行調試;使用STEP 7-Micro/WIN SMART編程軟件對CPU ST60進行組態和參數化,操作步驟如表1所示。
表1.操作步驟
|
步驟 |
內容 |
|
1 |
接線 |
|
2 |
進行外部脈沖位置控制模式(PTI)下的系統調試 |
|
3 |
STEP 7-Micro/WIN SMART連接S7-200 SMART |
|
4 |
組態運動軸 |
|
5 |
組態軸工藝對象的參數 |
|
6 |
下載到PLC |
|
7 |
用軸控制面板調試軸 |
|
8 |
編程 |
|
9 |
下載到PLC |
|
10 |
試運行 |
S7-200 SMART通過PTI方式控制V90定位的控制信號接線如圖4所示:
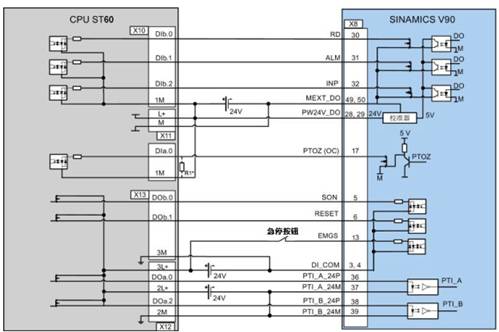
圖4 S7-200 SMART CPU 與V90控制信號連接
3.4.1 位置控制相關的參數
按照表2所示對伺服驅動器的位置控制相關的參數進行設置
表2.V90 位置控制參數
|
參數 |
說明 |
設置 |
|
P29003 |
控制模式設定為PTI |
P29003 = 0 |
|
P29250 |
使能PTI 絕對位置模式 |
P29250 = 1 |
|
P29010~P29014 |
PTI控制模式下的相關參數 |
根據實際條件設置 |
|
P29012 P29013 |
位置控制相關的參數 |
根據實際條件設置 |
3.4.2 USS通訊相關的參數
按照表3所示對伺服驅動器的USS通訊相關的參數進行設置
表3. V90 USS通訊參數
|
參數 |
說明 |
設置 |
|
USS波特率 |
USS 波特率8(38400bits/s) |
缺省值 |
|
P29004 |
USS 地址 |
0-31 |
|
PKW/PZD |
USS PZD/PKW 長度為0/4 |
缺省值 |
注意:
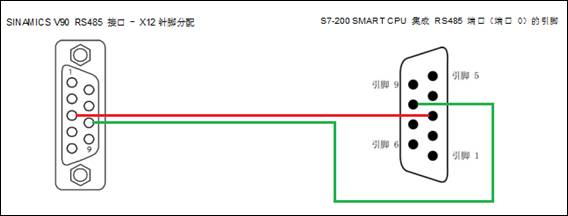
PLC的 RS485接口的波特率和驅動器USS地址要求與V90一致, 因此, 需要對V90里的參數P29004設置一致的USS地址。并且V90 USS RS485端口的波特率設置為38400bits/s,報文長度為4個PKW和0個PZD的USS協議。
在PLC的編程軟件中組態運動軸,詳細步驟參見《SIMATIC S7-200 SMART系統手冊》,注意在組態軸工藝對象的參數中需啟用從驅動器里讀取1FL6伺服電機絕對值編碼器的位置,如圖5所示。
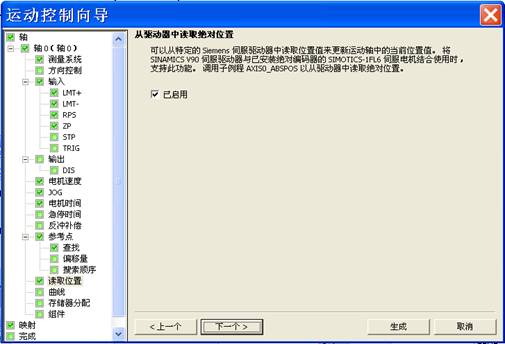
圖5 啟用從驅動器里讀取1FL6伺服電機絕對值編碼器的位置
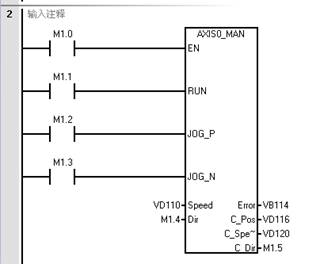
在PLC中編程如表4所示:
表4. PLC編程
|
啟用和初始化運動軸:執行AXISx_CTRL 。

|
|
使用手動模式運行軸運動:執行AXISx_MAN,輸入RUN、JOG_P 或 JOG_N之一,使軸速度或位置點動運行。 |
|
通過 SINAMICS V90 伺服驅動器讀取絕對位置值: |
AXISx_ABSPOS 指令用于讀取SINAMICS V90 伺服驅動器絕對值編碼器數值。讀取絕對位置值的目的是為了更新運動軸中的當前位置值。
SINAMICS V90 伺服驅動器與安裝了絕對值編碼器的 SIMOTICS-1FL6 伺服電機結合使用時,支持此功能。
AXISx_ABSPOS 指令的D_Pos 輸出,指示SINAMICS V90 伺服驅動器絕對值編碼器數值,該數值只在AXISx_ABSPOS 指令的完成位=1時有效,
為了保證D_Pos讀數的穩定值,需要采用完成位的上升沿轉移該數值。該數值顯示方式因為運動控制組態向導不同而顯示不同。如下所示:
(1)、測量系統選擇:工程單位
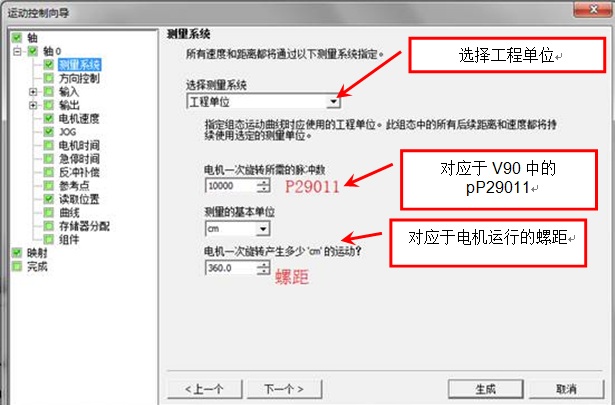
如果測量系統選擇為“工程單位”,則AXISx_ABSPOS.D_Pos的計算公式如下:
AXISx_ABSPOS.D_Pos ![]() ,數據類型為real 。
,數據類型為real 。
其中:r2521顯示V90 的編碼器實際位置值,r2521正確顯示必須先將V90驅動器ABS。
注:上邊公式的假設條件為P29247 = 2^20=1048576, P29248 = 1, P29249 = 1
(2)、測量系統選擇:相對脈沖
如果測量系統選擇為“相對脈沖”,則AXISx_ABSPOS.D_Pos的計算公式如下:
AXISx_ABSPOS.D_Pos ![]() ,數據類型為DINT。
,數據類型為DINT。
6SL3210-5FB10-1UA2西門子V90 0.1KW 200V驅動器