- 產品
- 供應
- 公司
- 新聞
|
|
||||||||||||||||||||||||||||
M系列兩相步進電機驅動器是基于PI電流控制算法設計的高性價比細分型驅動器,低噪音,低振動,低發熱。可通過撥碼開關選擇運行電流和細分,有16種細分,16種電流供選擇,具有過壓、欠壓報警,相電流過流保護,馬達相位開路檢測,其輸入控制信號均采用光電隔離。內置自運行模式,可以設置自運行速度,也可由外部信號控制自運行時的啟動和停止以及電機的正反轉。脈沖,方向,和使能端都有恒流和反向保護,可以直接接4-28V的信號電平。使能端也可設置為報警輸出端。
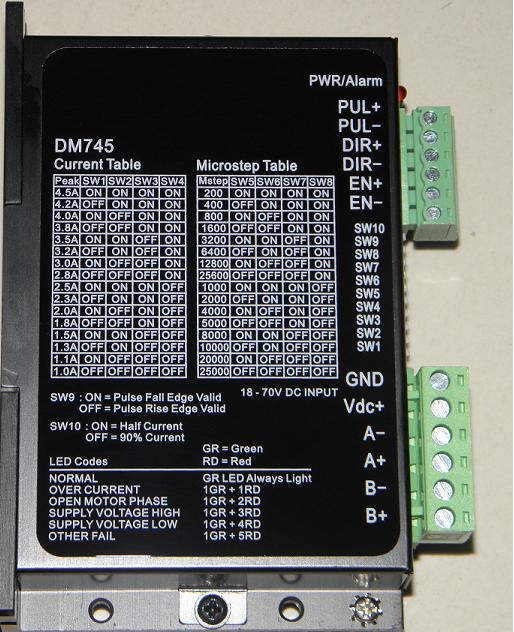
l 供電電源 18-70V DC
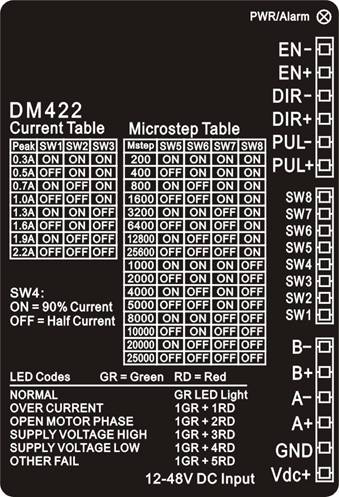
l 輸出電流 16檔拔碼開關選擇,最大4.5安培(峰值)
l 電流控制 PI控制算法,低振動,低噪音,低發熱
l 細分設定 拔碼開關設定,16檔可選
l 系統自測 驅動器上電時自動檢測電機參數,由此可 優化電機電流算法和抗共振阻尼算法
l 控制方式 支持脈沖和方向模式以及雙脈沖模式
l 空閑電流 約1秒沒有脈沖信號輸入,電流自動減半
l 自運行 自運行時可由編碼開關設定連續自運行,以及受控自運行,也可由細分開關設定自運行速度
l 恒流輸入 脈沖,方向和使能端子都有恒流輸入功能,可以直接連接PLC等高電壓輸入信號,而不用外加串聯電阻降壓限流保護
l 報警輸出 通過內部跳線,可以把使能端的功能轉變為報警輸出
驅動器參數 |
最小值 |
典型值 |
最大值 |
單位 |
供電電壓 |
18 |
- |
70 |
VDC |
輸出電流(峰值) |
1.0 |
- |
4.5 |
Amps |
控制信號電流 |
10 |
15 |
18 |
mA |
步進脈沖頻率 |
- |
- |
500 |
KHZ |
步進脈沖寬度 |
2 |
- |
- |
us |
方向信號寬度 |
100 |
- |
- |
us |
欠壓保護點 |
- |
17.5 |
- |
V |
過壓保護點 |
- |
75 |
- |
V |
控制信號電壓 |
4 |
5 |
28 |
V |
驅動器初始化時間 |
2 |
s |
||
自運行速度 |
50 |
800 |
圈每分 |
冷卻方式 |
自然冷卻或強制冷卻 |
|
使用環境 |
使用場合 |
避免粉塵,油霧及腐蝕性氣體 |
工作環境溫度 |
0-42°C [32 - 106°F] |
|
最高環境濕度 |
90% RH(無結露) |
|
存儲溫度 |
-10-70°C [14 - 158°F] |
|
振動 |
5.9m/s2 max |
|
在端口,電機,以及電源接線時,請不要帶電操作
將電源的正極連接到驅動器的Vdc+,將電源的負極連接到驅動器的GND。請不要接反或者接錯位置,這樣會損壞里面的硬件,由于電源插錯位置或者接反引起的損壞不在保修之列。
如果要同時保證高效率和低噪音,則驅動器供電電壓至少5倍于電機額定相電壓(即電機額定相電流×相電阻)。
如果您需要電機獲得更好的高速性能,則需要提高驅動器供電電壓。如果使用穩壓電源供電,要求供電電壓不得超過70V。如果使用變壓器供電,供電電壓不得超過50V,因為對變壓器供電來說,在負載很輕時(如電機不轉)它的電壓約超過電機運轉時的1.4倍。
想要電機平穩安靜的運轉,選擇低一點的電壓。
最大供電電流應該為兩相電流之和。通常情況下,您需要的電流取決于電機的型號、電壓、轉速和負載條件。實際電源電流值大大低于這個最大電流值,因為驅動器采用的是開關式放大器,將高電壓低電流轉換成低電壓高電流,電源電壓超過電機電壓越多,需要的電源電流越少。
當電機減速的時候,它會像發電機一樣將負載的動能轉化為電能。一些能量會被驅動器和電機消耗掉。如果您的應用中有大的負載以高速運行,相當大的動能會被轉換成電能。通常簡單的線性電源有一個大的電容來吸收這些能量而不會對系統造成損壞。開關電源往往會在過壓的狀況下關閉,多余的能量會回傳給驅動器,可能會造成驅動器的損壞。因此在這種情況下,要外接吸收電阻或電容。